LAUV Magnetometer and Side Scan Sonar Exercise
From Jan. 18 through Jan. 20, 2017, OceanScan-MST had the opportunity to run several LAUV surveys in cooperation with the Porto University, the Portuguese Navy and the Portuguese Hydrographic Institute. The main goals were: (1) validate coordinated use of 3 LAUV systems equipped with Side Scan Sonars (SSS) and (2) compare the latest integration and option available in the LAUV system, a Self Compensated Magnetometer (SCM) from Ocean Floor Geophysics (OFG) with a traditional towed magnetometer from the Portuguese HI.
The first two days of the exercise took place in Tagus river (Mar da Palha) and it was possible to cover an area equivalent to 30 football fields in less than 1 hour using in a coordinated manner 3 LAUV systems equipped with SSS.
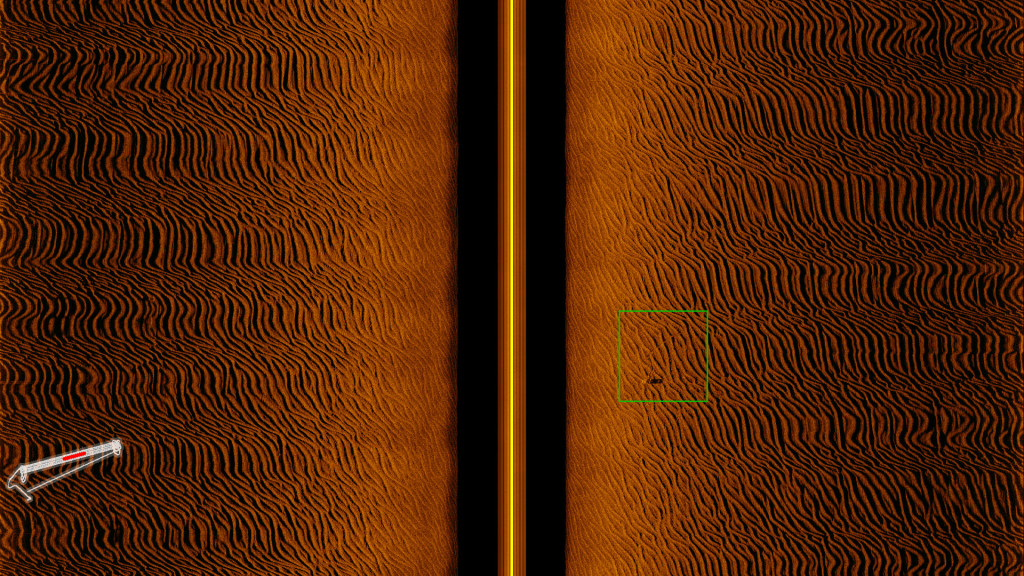
For the last day, now taking place in Sesimbra, a barrel was deployed by the Portuguese Navy divers squad to be surveyed by the LAUV equipped with the SCM. A similar survey was executed using a traditional towed magnetometer by HI.
Many thanks to everyone involved in the exercise.