
Depth rating:
100 meters
Endurance:
Typical: > 8 hours @ 3 knots
Specific Configurations: > 48 hours @ 2 knots
Speed:
up to 5 knots
Hull diameter:
15 cm
Length:
115 up to 230 cm
Weight in air:
15 up to 35 Kg
Standard Navigation:
GPS, AHRS, Depth sensor
Standard Communication:
Wi-Fi and GSM/HSDPA
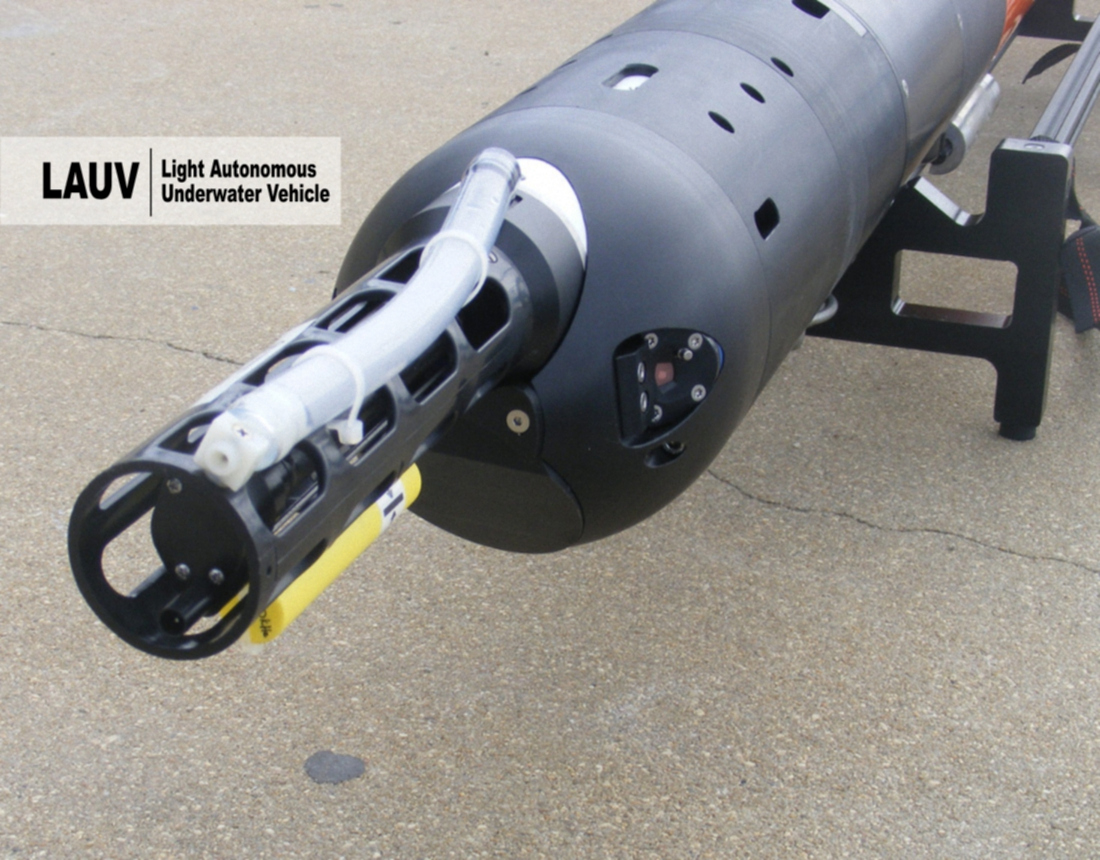
HIGHLIGHTS
Flexible fins
- To increase the system robustness without affecting the system performance, the fins and antennas mast are flexible
External ballast rail
- The weight of the LAUV can be easily adjusted for fresh and saltwater operations, adding or removing ballast weights from the external ballast rail
Powered by Lithium-ion batteries
- Typically the LAUV is equipped with enough power for a regular day of operation (8 hours). Nevertheless, with a fast charging time, the LAUV is ready for a new operation in less than 2 hours
Forward Looking Sonar
- Particularly useful to avoid large obstacles during operations
Open source software
- The LAUV on-board and off-board software is based on the open source toolchain developed by LSTS from Porto University.
External USB Pen for data logging
- Fast access to collected data is guaranteed via an external USB pen mounted on the LAUV nose. Exchange a full USB pen by an empty one and the LAUV is ready for a new mission. Meanwhile you can review the collected data in your laptop.
Improved communication range
- When on surface you can access the LAUV via the Manta gateway extended range Wi-Fi radio. When the LAUV is out of the Wi-Fi range, the GSM module can be the alternative solution or the Iridium.
Safety features
- The LAUV includes several safety features making sure you have the LAUV always in control. The safety features includes: report of the LAUV status and estimated position via Wi-Fi, GSM, Iridium or acoustic modem; abort a mission via acoustic modem; stand alone acoustic pinger; and many others.
Remote control via smartphone
- Install the LAUV remote app in your smartphone and you can tele-operate the LAUV and check the system status.
Support for multi-vehicle operations
- Support for multi-vehicle operations
Easily deployed from shore or a small boat
- The LAUV lightweight and small size makes possible to be easily deployed. No cranes or special tools are required. After deployed on the water, the LAUV can be tele-operated to the operation area.
LAUV OPTIONS
The LAUV is a platform able to carry different sonar and sensors combinations. The LAUV modular and flexible design makes possible to configure a system during production according to the end user needs. Several of these possibilities can be found below. Nevertheless, if you have other options in mind please contact us.
NAVIGATION
DVL – Doppler Velocity Log
- To improve navigation accuracy the LAUV can be equipped with a DVL. We have available options from different manufacturers: LinkQuest, Nortek and Teledyne RDI. The current profiling option (ADCP) is available on request for all the three possibilities.
Tactical Grade Inertial Measurement Unit
- The LAUV in its base configuration is equipped with a IMU based on MEMS technology. A tactical grade IMU based on FOG technology is available as an option. This will reduce the LAUV position drift during dives.
LBL – Long Baseline
- To further improve navigation accuracy the LAUV can be equipped with a LBL module combined with at least two LBL beacons, to be deployed in the area of operation.
USBL – Ultra-short baseline
- Another alternative available as an option in the LAUV to improve the navigation accuracy.


COMMUNICATION
Satellite communication module
- The LAUV can be equipped with an Iridium SBD module and a compatible antenna. With this module the LAUV is able to receive and send messages worldwide.
Underwater Acoustic Modem
- When underwater, where radio communications are not possible, the LAUV can use the acoustic modem to exchange messages with the acoustic modem installed in the gateway or other vehicles.
SONAR & IMAGE
Side Scan Sonar
- Available options from the major side scan sonar manufacturers such as Imagenex, DeepVision, Blueprint, Klein and Edgetech. Most of the options include customized transducers for the LAUV.
Multi-Beam Echo Sounder
- The cost effective MBES from Imagenex is the only standard option available. If you have other options in mind please contact us.
Forward Looking Sonar
- A Single Beam Echo Sounder pointing forward is the module responsible for checking if there are no major obstacles in front of the LAUV. This module is particular important for missions when the LAUV needs to fly close to the seabed.
Micro-Bathymetry/Nadir Gap Filling
- Combined with a high resolution Side Scan Sonar the BlueView MB2250 will reduce the operation time.
Digital Video Camera
- A high sensitivity industrial camera combined with 4 high intensity LEDs installed far away from the camera, to avoid scattering, will help you to identify the objects you are looking for.

SENSORS
The LAUV can combine several sensors to gather data from the water column. The LAUV most common request are CTD, sound velocity, turbidity, chlorophyll, rhodamine and fluorescein. We work with the major sensors manufacturers and we are able to offer an extended range of sensors such: pH, dissolved oxygen, redox, crude and refined oil, etc..
More complex and advanced sensors are also possible, such:
- MicroRider microstructure turbulence measurements
- Digital Holographic Particle Imaging System
- Magnetometer sensor
MANTA GATEWAY
Operational accessory to enable the interface between wireless and acoustic communication.
Manta Communications Gateway works as a plug-and-play communication hub, supporting seamlessly wireless and acoustic communication between the operator and the LAUV, enabling extended connection range. It allows multiple operators to control and monitor multiple vehicles in a networked environment.
Battery powered for full autonomy and portability and comes in a rugged waterproof enclosure that allows installation in a buoy and/or operation in open vessels such as RHIBs. Serves as a communication, navigation and tracking tool, helping the operator to remotely track, monitor, command and interact with the LAUV while in full operation mode.
The Manta Gateway may integrate several capabilities and accessories:
- Wi-Fi – This is the primary mean that enables long range, high-throughput communication with the vehicle when it is not submerged
- Acoustic Modem – for long-range underwater communications.
- HSDPA/GSM modem – provides direct connection to the internet when GSM network coverage is available.
- Iridium SBD Modem – supports satellite communications with worldwide coverage.
- GPS Receiver – provides the device’s real-time position. This feature allows the operator to understand its own location in the mission map. It’s particularly useful when the operations are conducted from a ship.

OPERATOR CONSOLE
The operator console is a regular or a rugged computer, usually a laptop, that runs Neptus – the command and control user interface. When connected to a Manta Communications Gateway the operator can interact with all the vehicles connected to that gateway’s wireless network.
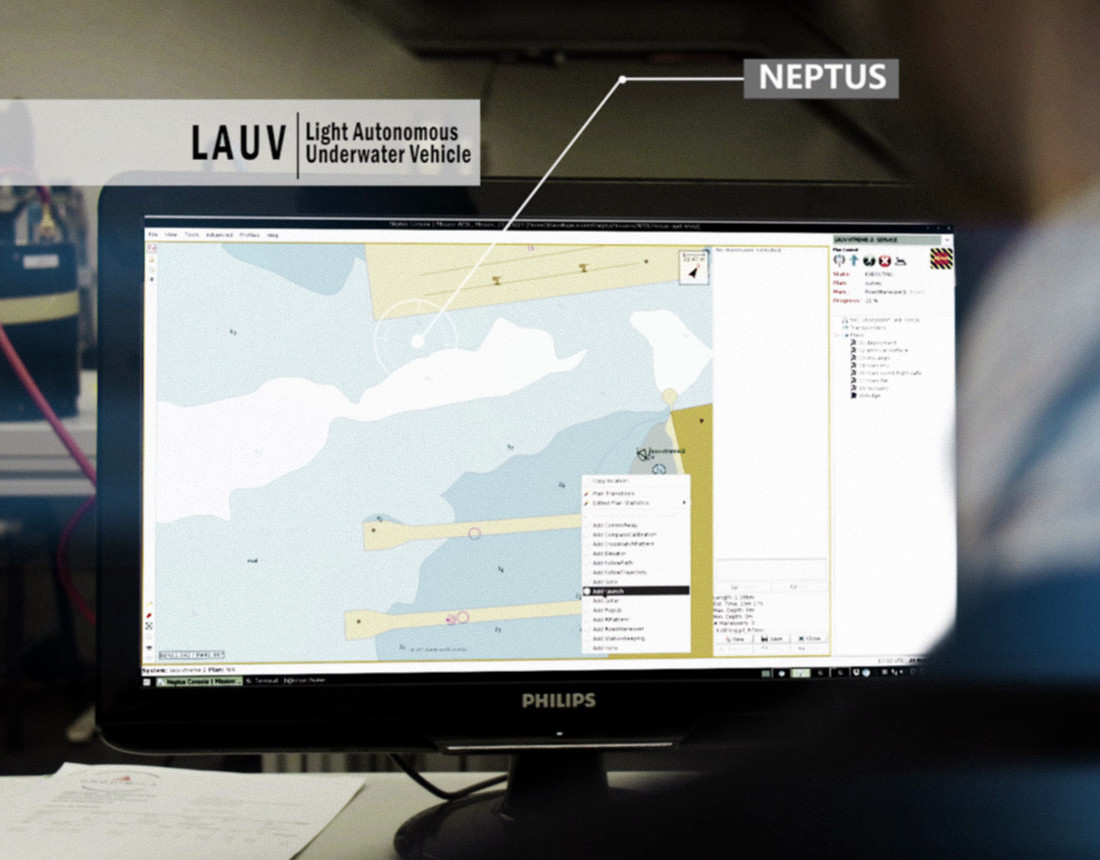
NEPTUS
Neptus provides a distributed command and control user interface specifically tailored for the operation of one or multiple LAUV vehicles. LAUV support under Neptus covers all the different stages of the mission life cycle: configuration, planning, simulation, execution and pot-mission analysis. For this purpose Neptus includes two distinct tools, the Operator Console and the Mission and Review and Analysis tool.

LAUV REMOTE
This simple, yet useful app, can be used in a regular smartphone to tele-operate the LAUV and check the system status. If you prefer a joystick, just connect one you like to the computer running Neptus.
Please note that the LAUV specifications may be dependent on the system configuration, such as: endurance, speed, length, weight, etc.. Contact us for further details.